定位系统和执行机构
运动控制、定位系统和线性执行器是运动控制系统中产生所需运动的部分。
驱动器是一种通过将各种形式的能量转换为旋转或直线机械运动而产生物理运动的装置。
线性运动执行器是一种将各种形式的能量转化为线性运动的装置。执行机构(电动气缸)主要是产生推力的装置,采用顶点或滚珠丝杠作为驱动机构。
定位系统紧凑,易于使用,并设计为交钥匙操作。大多数预配置的定位系统采用刚性底座,滚珠/顶点螺钉,伺服/步进电机与积分控制器+驱动器的快速机器调试和操作方便。

回转工作台使用精密加工的蜗轮总成和滚珠、十字滚子或角接触轴承来支持工作台顶部的负载。不同的齿轮比率的选择允许要么高分辨率或高速在一个低剖面包。使用任何步进电机或伺服电机系统来驱动转台是一个关键的优势,因为它允许使用首选的运动控制系统。
定位系统对比图:
| 属性 | 液压 | 气动 | 电 |
| 功率密度 | 高 | 低 | Med.高 |
| 精度 | 媒介 | 低 | 高 |
| 能源效率 | 低 | 媒介 | 高 |
| 清洁 | 低 | 媒介 | 高 |
| 维护 | 高 | 媒介 | 低 |
| 安装成本 | Med.高 | Med.高 | 低 |
| 可伸缩性 | 低 | 媒介 | 高 |
| 组件成本 | 媒介 | 低 | Med.高 |
| TCO * | 媒介 | 高 | 低 |
我们提供的定位系统和执行器:
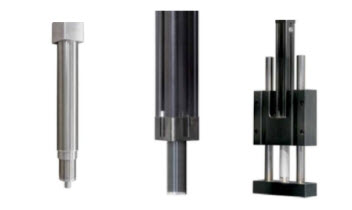
线性致动器
运动控制系统的一部分,产生所需的运动。致动器是一种通过将各种形式的能量转换为旋转或线性机械运动而产生物理运动的装置。线性运动驱动器是一种将各种形式的能量转化为线性运动或直线推/拉运动的装置。执行机构(电动气缸)主要是产生推力的装置,采用顶点或滚珠丝杠作为驱动机构。

纳米精度阶段
用于要求高精度、可重复性和/或光滑性的应用。为了达到所需的精度和可重复性,所有子组件都被加工到非常严格的公差。这类级的典型精度是在亚微米或纳米范围内测量的。

旋转阶段
一种运动系统中的机械部件,用于使物体在单轴或平面上旋转。回转工作台或回转工作台这两个术语经常与回转工作台互换使用。所有的旋转定位阶段都由一个平台和一个底座组成,通过某种形式的轴承或导向装置连接起来,使平台只能围绕一个轴或一个平面旋转。
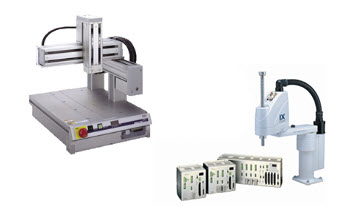
台式机器人
SCARA和桌面型机器人理想的高速,精密操作,如密封,点胶,零件插入,装配,和更多。目前,SCARA机器人的最大水平射程为800毫米,最大垂直射程为300毫米,IX系列SCARA机器人的最大有效载荷能力为10公斤,最大速度超过每秒7000毫米。

皮带驱动的电动阶段
结合高力矩负载能力和高速能力,生产具有特殊的扭转刚度和可靠性的定位执行器。最大行程长度为2500毫米,速度为1750毫米/秒的交流伺服电机。它具有高刚性的基础结构,双滑块选择大力矩和悬垂,高耐用聚氨酯复合同步带,和高的基础抗扭转变形。

非电动皮带驱动阶段
用于高速(和/或长行程)定位应用,螺旋驱动阶段是不实际的,通常冲程长度超过6英尺。皮带和皮带轮驱动机构,以及圆轨或方轨线性轴承,提供了一个适度可重复的高速定位表。独特的皮带驱动的线性阶段是他们的能力,提供相同的速度能力,独立的旅行长度。

电动螺杆驱动阶段
可编程气缸电动执行机构,灵活,智能,和经济。结合高力矩负载能力和高精度能力,产生了一个定位执行机构,具有特殊的扭转刚度和可靠性。

非电动螺杆驱动阶段
适用于精度和重复性比轴向推力更重要的应用场合。底座、支架和所有组件都经过精密加工,从而提高了工作台的精度和可重复性。这些定位台使用顶点或滚珠丝杠作为驱动机构。方形或圆形轨道直线轴承用于承载用户负载。这些定制配置的线性定位阶段和执行机构允许用户负载非常准确和重复的定位。
