完成副驾驶员
斯科
326444
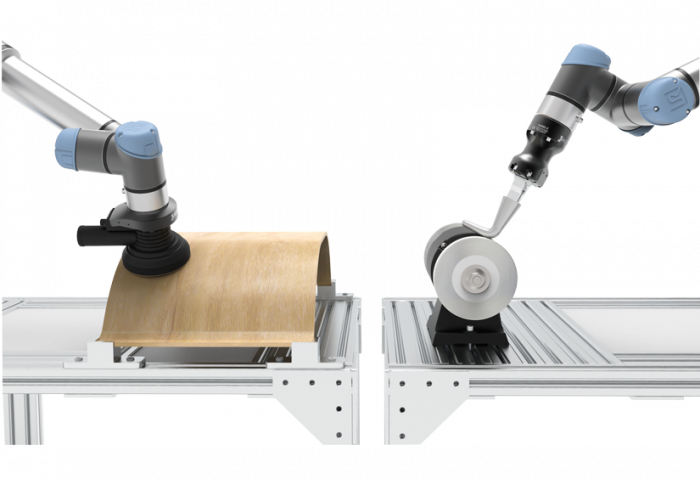
Robotiq完成Copilot是用于完成使用通用机器人的应用程序的软件。您不需要机器人背景来使用整理副单。其直观的编程接口指导您通过设置高效的整理应用程序的步骤。联系人偏移节点使用外部工具上的点作为测量磨损的引用。联系人偏移量验证您希望随时验证该工具的确切位置。如果有略有变化,机器人程序会自动适应所有相关参数。
你可以通过少于10个路径点来编写复杂的完成轨迹。无论是在平面、曲面或球面上,精加工副驾驶产生一个完整的路径,并在每个周期施加一致的力。完成副驾驶让你编程一个外部TCP。这告诉机器人,加工工具是在机器人的外部,不像在大多数合作机器人应用程序。完成任务后,机器人将零件带到外部TCP进行处理。接触偏移节点使用零件上的参考点来验证其位置。如果有略有变化,机器人程序会自动适应所有相关参数。
| 产品类别 | 机器人配件 |
|---|---|
| 制造商 | robotiq. |